
自动捡球机器人编程实践(计算机与人工智能系第九学期实践项目优秀作品)
日期:2024-04-04 作者:mafengyuan 来源: 浏览量:3581
项目成员:计算机与人工智能系学生
作品简介:自动捡球机器人,运用机器人驱动控制、机械臂操作、目标检测和距离检测等技术。机器人能够自主地捡起和放置球。通过对机器人技术的研究和实践,学生已经掌握了机器人自主操作和智能控制的关键技术。该作品展示了学生在机器人技术方面的才能和实践能力。项目包括:(1)机器人硬件设计;(2)图像处理与目标检车;(3)机器人协同。
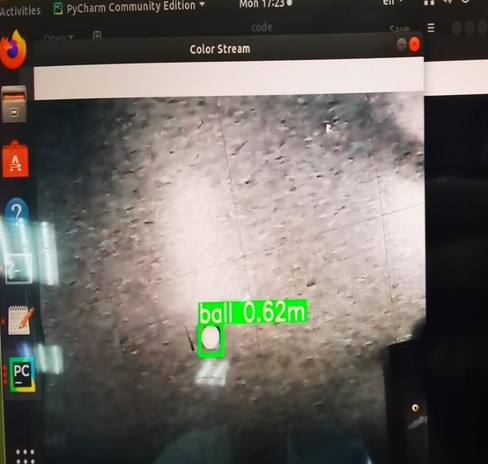
图1 实验小组
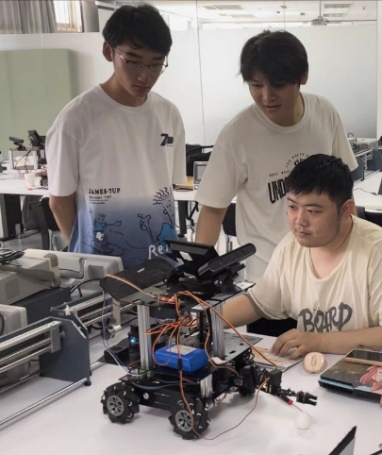
图2 摄像头测距
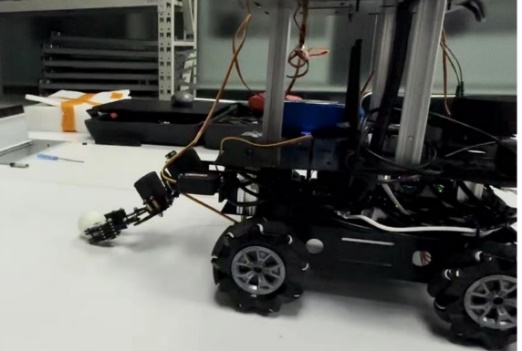
图3 向目标移动
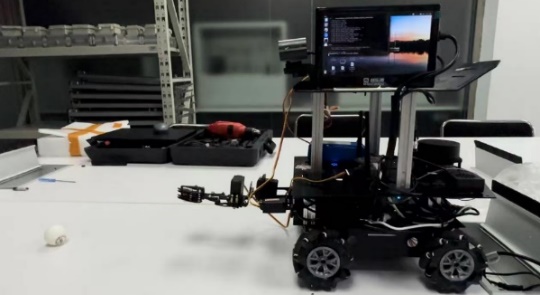
图4 捡球
【收藏本页】